
Eciton robotica: Design and Algorithms for an Adaptive Self-Assembling Soft Robot Collective
Type
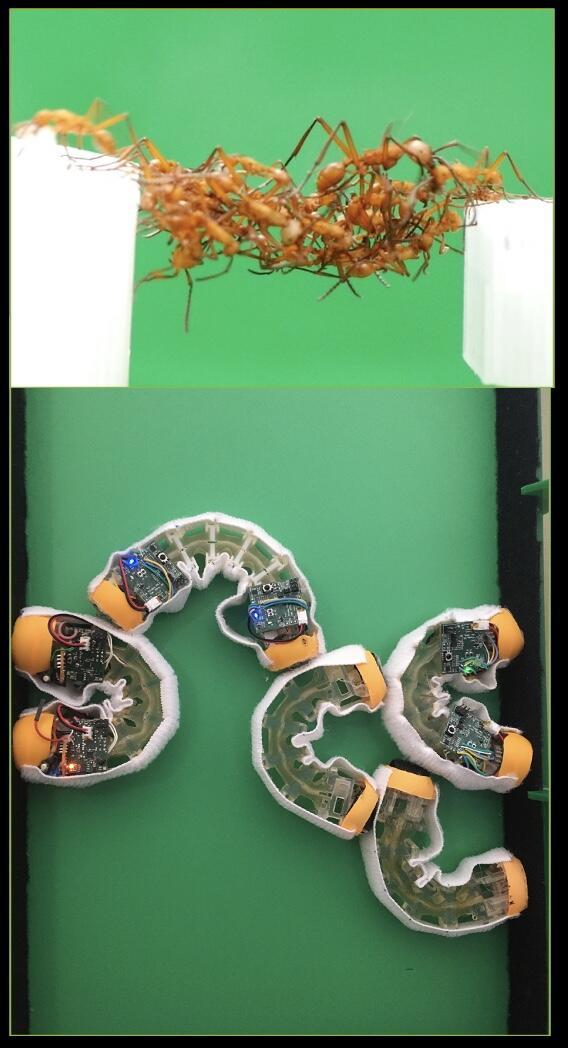
Social insects successfully create bridges, rafts, nests and other structures out of their own bodies and do so with no centralized control system, simply by following local rules. For example, while traversing rough terrain, army ants (genus Eciton) build bridges which grow and dissolve in response to local traffic. Because these self-assembled structures incorpo- rate smart, flexible materials (i.e. ant bodies) and emerge from local behavior, the bridges are adaptive and dynamic. With the goal of realizing robotic collectives with similar features, we designed a hardware system, Eciton robotica, consisting of flexible robots that can climb over each other to assemble compliant structures and communicate locally using vibration. In simulation, we demonstrate self-assembly of structures: using only local rules and information, robots build and dissolve bridges in response to local traffic and varying terrain. Unlike previous self-assembling robotic systems that focused on lattice- based structures and predetermined shapes, our system takes a new approach where soft robots attach to create amorphous structures whose final self-assembled shape can adapt to the needs of the group
This paper demonstrated one of the first fully-untethered soft robots that can self-assemble in 3D. Based on our “Flippy” soft climbing robot IROS 2017. Also see our SSR Youtube Channel: Eciton Robotica Movies