Towards Collective A.I.
Intelligence is a Social Phenomenon - Maya Mataric, 1993.
The main theme of our lab is investigating Collective Intelligence, and we do it in many ways: Robots and Theory, Bio-Inspired and Biology, and Domain Applications. You can read about the Broad Themes and Current & Past Projects on this page. For more details, see Nagpal's IROS Plenary Talk (2022), our Youtube Channel, Selected Publications, and Lab Highlights.
Broad Themes
In nature, groups of thousands of individuals cooperate to create complex structure purely through local interactions -- cells, ants, bees, fish. How do we create artificial collectives of the scale and complexity that nature achieves? Our group is interested in robotics and self-organization, where large numbers of relatively simple agents cooperate to produce complex collective behavior. Our work spans Robotics, AI, Biology and has three main themes:
- Bio-inspired Robots & Swarms: We develop bio-inspired approaches for building and programming novel robotic systems that rely on large numbers of relatively cheap and simple agents, We are especially interested in the body-brain-colony design space and in embodied intelligence, i.e. how exploiting mechanical intelligence and collective intelligence together can enable novel autonomous robots for new tasks and environments. Our lab is known for several robotic systems: the Kilobot thousand robot swarm, the BlueSwarm underwater robot swarm, the Termes collective construction robots, the Eciton robotica soft self-assembling robots, and the ROOT educational robot (iRobot).
- Collective AI and Self-organization: We explore multi-agent models, algorithms, and theory inspired by self-organization in biology (cells, social insects, fish schools). We investigate biological principles for decentralized coordination, novel communication strategies (e.g. stigmergy, implicit, tactile), and local2global complexity (achieving more than the sum of the parts). Our current algorithmic work is done in close conjunction with experimental robotics or biology, but in the past we also investigated abstract systems. Our group is especially known for demonstrating global-to-local compilation, i.e. how user-specified global goals can be translated into decentralized local agent interactions with correctness guarantees,
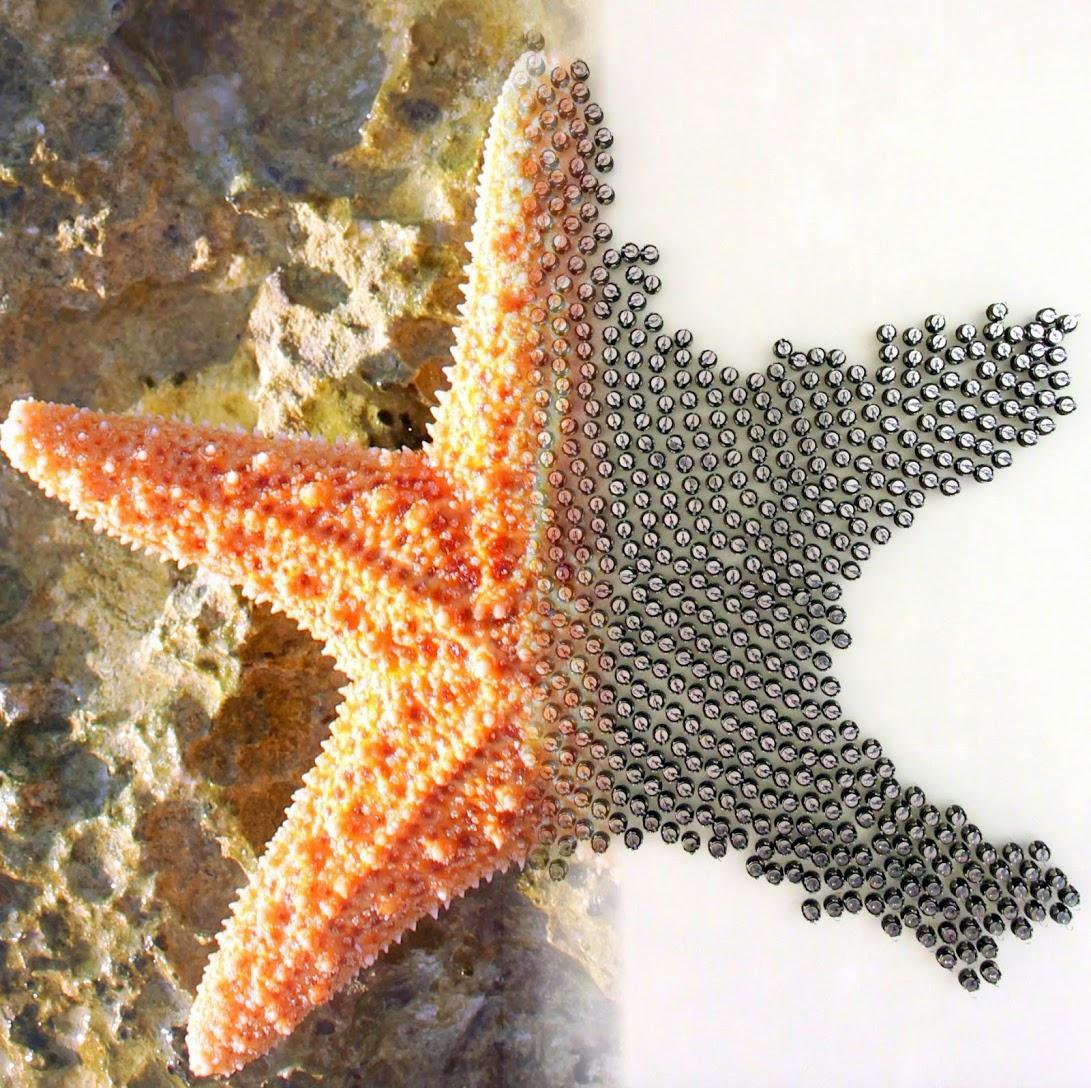
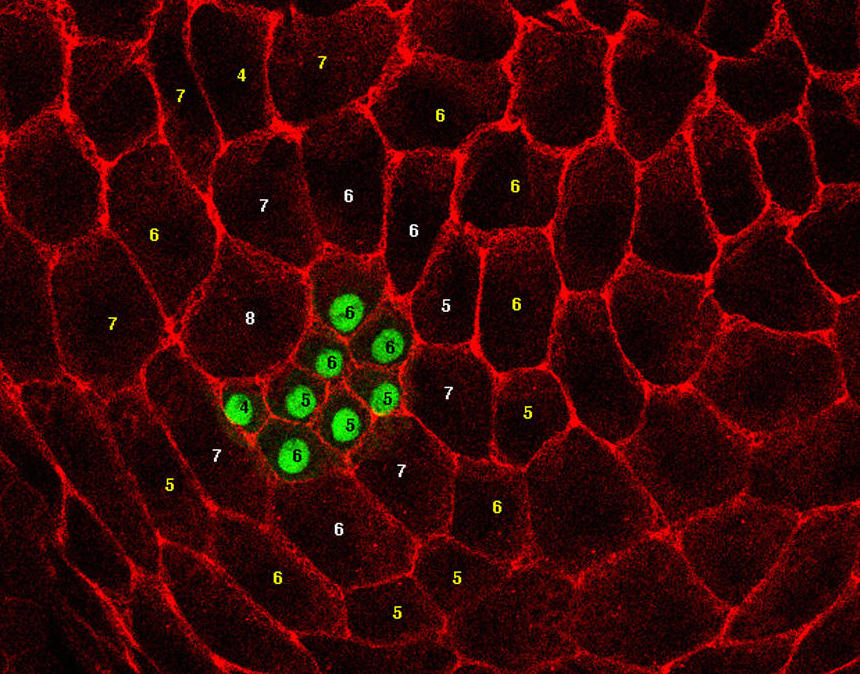
- Biological Collectives: We develop mathematical and experiment-driven models of how system-level properties emerge in natural collective systems. We work closely with experimental biologists, and conduct field studies. Our previous work focused on epithelial tissues in fruit fly development, relating local cell divisions to global tissue networks. Our recent work focused on social insects and "physical" collective intelligence, e.g. army ant self-assembly, collective transport in crazy ants, and mound-building termites. We are now working on fish schools, studying implicit coordination and hydrodynamic interactions.
- Swarms IRL! Recently we have begun exploring new swarm designs for the “real world”, taking our research out of the lab and into the (semi) wild! This is an evolving and interdisciplinary effort. Current topics include: underwater robots & swarms for coral reef monitoring, zeroG/microgravity robots for space inspection, and human-centered swarms for art and architecture. You can read more about this below.
Current Research Projects
BLUEniverse
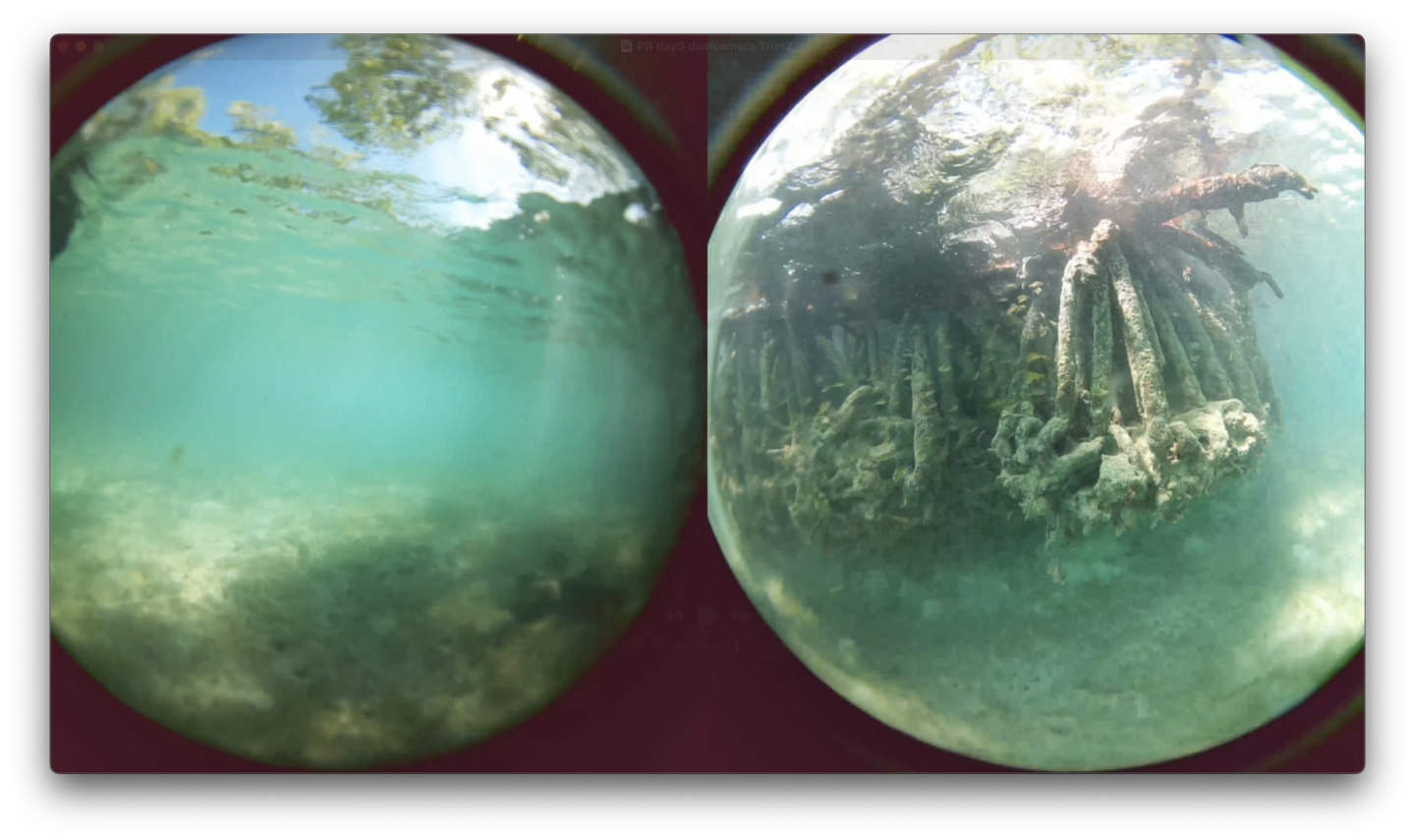
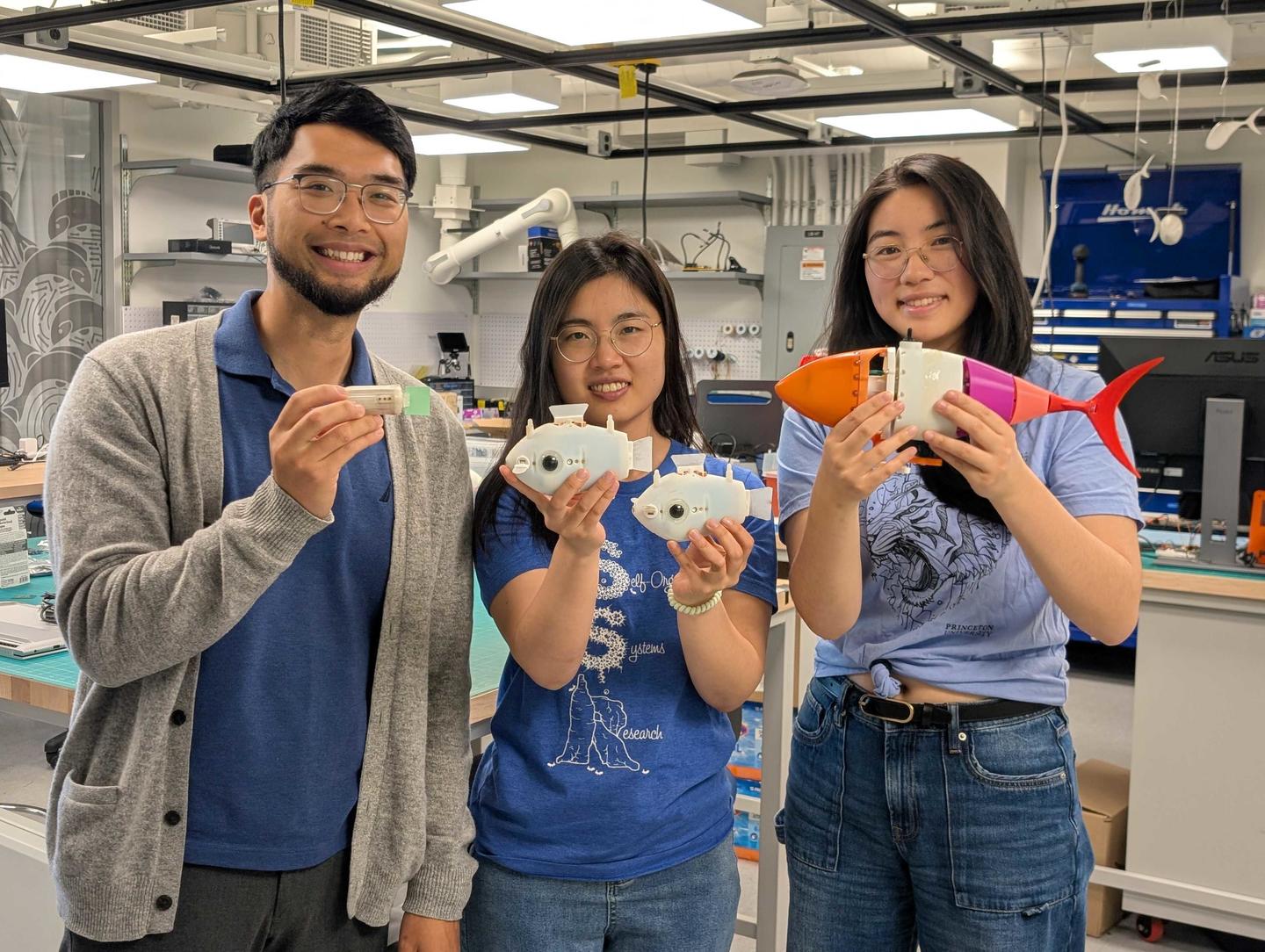
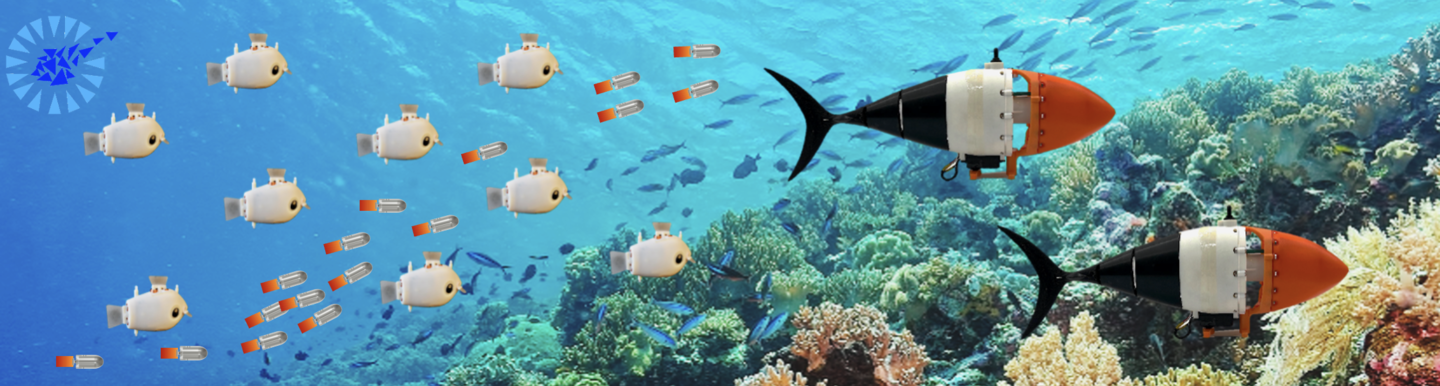
Fish schools are amazing! Thousands migrate long distances, forage together in cluttered coral reefs, and create flash expansions to evade predators. Fish-inspired underwater swarms can enable less-invasive environmental monitoring in sensitive coral reefs, and advance our understanding of fish school biology. Our lab is interested in both fish-inspired robot designs and natural fish schooling behavior. Our first robot platform is BlueSwarm (SciRob'21), a novel 3D underwater swarm with 10 fully-autonomous miniature bluebot robots (~13cm) with 3D vision and 3D multi-fin maneuverability. We use Blueswarm to investigate and demonstrate the power of implicit coordination, demonstrating for the first time a wide range of algorithms from flocking and evasion to diamond formations underwater. More recently we are working on two new designs: BlueKoi (~25cm) and BlueGuppy (~5cm). The goal of the BlueKoi project is to eventually operate in coral reef environments, combining a powerful tuna-inspired actuation (tunabot flex) with koi-inspired body bending maneuvering. In the BlueGuppy project we are creating miniature underwater robots to explore the physics of fluidic stigmergy. We are also working with biologists to study 3D fish school formations and how they change with long durations and flow. This year we have begun a series of robot field studies, testing robot vision and locomotion on the Jersey Shore and in Puerto Rico.
Selected Pubs: Science Robotics (Cover Article) 2021, DARS 2024, Scientific Reports 2025, IROS 2025.
Fun Videos: BlueSwarm, BlueGuppy, BlueKoi !
Swarm Gardens & Architectures
Living architectures, like plants and beehives, constantly adapt and self-organize in response to their environment. Our Swarm Architectures project is a collaboration between roboticists and civil engineers, to investigate how swarm intelligence and adaptive mechanical designs can create "Living-like" architectures that invoke nature and promote well-being. Our first demonstration is The Swarm Garden, a human-scale swarm facade consisting of a network of 35 "flower" modules that mechanically and collectively respond to light, motion, and people. We held our first public exhibit at the Lewis Arts Complex on April 9, 2024. Over 100 visitors interacted with the Swarm Garden and attended a live performance where a dancer used a wearable to improvise choreography with the swarm. We are exploring many concepts within this testbed: people-swarm interaction, adaptive shading mechanisms and facade designs, reconfigurable architecture, and the art-engineering intersection.
Pubs: Science Robotics 2026
Videos: Highlights, SEAS News, CreativeX
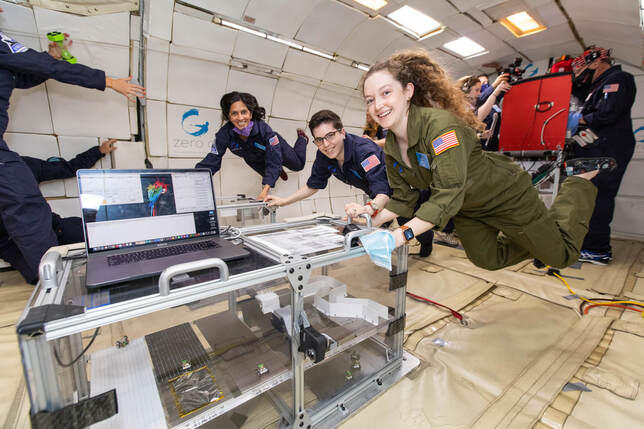
Swarm 3D Inspection for Earth and Beyond
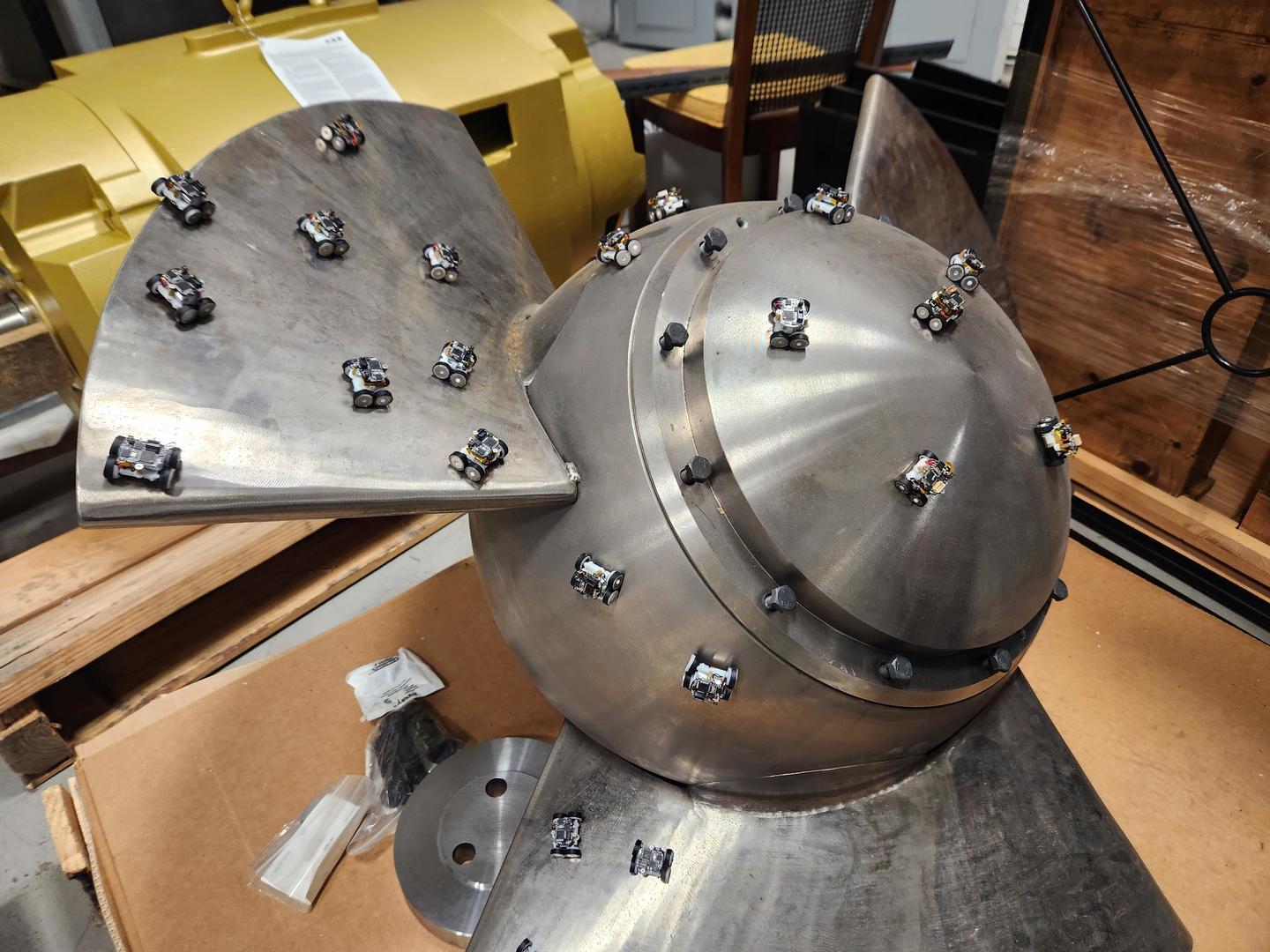
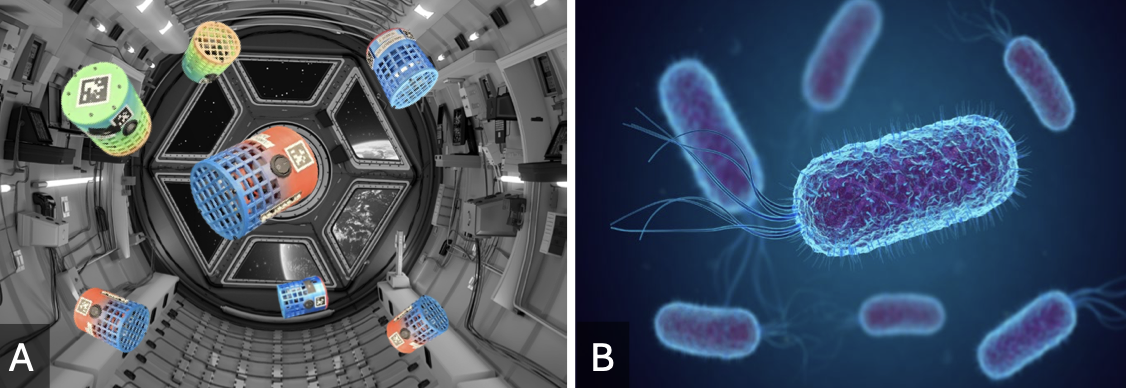
Imagine a future where small robotic teams roam our infrastructure – bridges and pipelines, space stations and lunar gateways - monitoring health and detecting problems promptly, such as leaks and cracks. Swarms of robots offer many advantages for inspection, including high parallelization, resilience to failure, and cooperative actions. In this project, our group is investigating robot swarms that traverse and monitor complex 3D structures. We are interested in the physical challenges of climbing robots and moving in microgravity. Our current hardware testbed consists of 10 miniature Rovable robots that use magnetic wheels to traverse 3D metal structures. We tested this robot and others in ZeroG flights (with MIT/Aurelia, NASA REDDI 2021). We are also investigating new algorithms for more-than-the-sum swarm productivity through cooperation. Currently we are exploring a new class of swarm algorithms called “strategic sacrificing” that self-optimize high group productivity through role switching.
Selected Pubs: ANTS 2022, DARS 2024 (Best Paper Finalist)
Fun Videos: ZeroG (Vomit Comet) Video 1 & Video 2
Past Projects
The SSR lab is proud and grateful to have had many accomplishments over the years. Our lab has demonstrated several "firsts" in robot swarms; in 2014 our work on Kilobots and Termes robots were chosen for Science “Top 10 breakthroughs” and in 2010 our work on Self-adaptive Modular robots and orthotics was IFAAMAS dissertation award runner-up. We co-led the Robobees NSF Expeditions Project (2009-2014, Scientific American 2013). We commercialized two robots Kilobots and ROOT; tens of thousands of robots exist in labs, schools, and homes worldwide. We have also made discoveries with biologists, both in social insects and cell tissue networks (Nature Comms 2022, Nature 2004), and our work on mound-building termites was featured in a non-fiction book Underbug (2018).
Robot Swarms
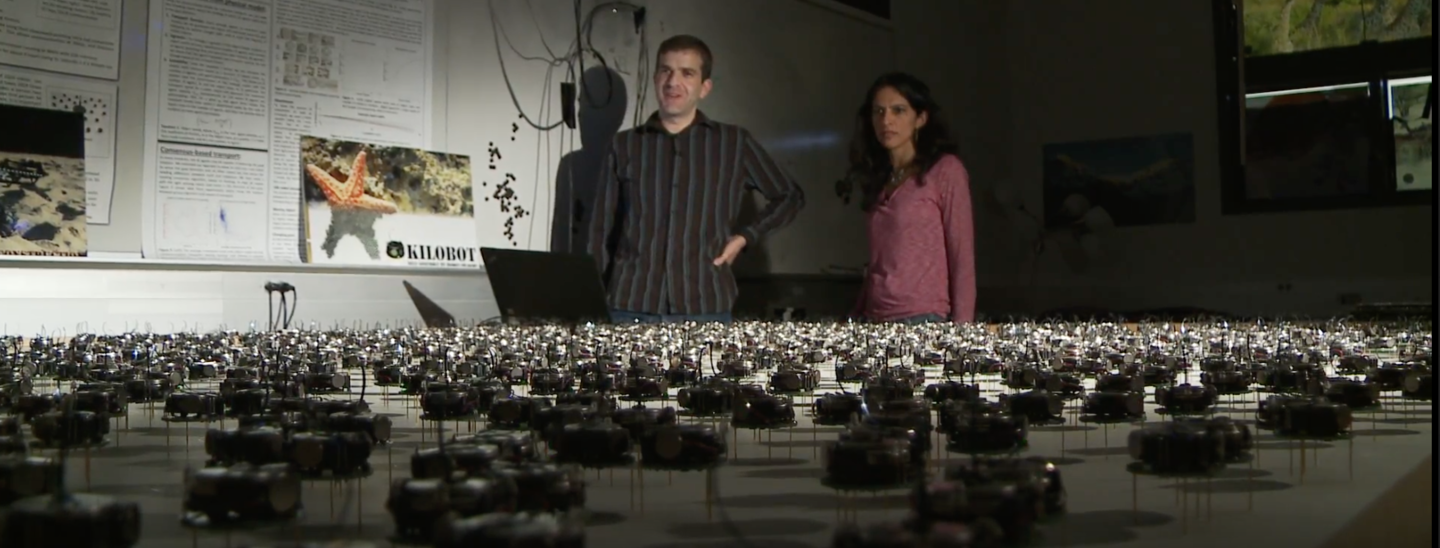
Kilobot 10^3 Swarm: The first thousand robot swarm to demonstrate large-scale programmable self-organization from purely local interactions between minimalist robots (Science 2014). We investigated many topics: morphogenesis-inspired self-assembly, ant-inspired collective transport, error cascades, and swarm inspection. Our work demonstrated that complex large-scale behavior could emerge from many simple, inexpensive, and decentralized robots in a real physical system and lead to new insights. The Kilobots have had lasting impact on the field. Kilobots were commercialized with Kteam Inc, and thousands of publications exist from labs worldwide using Kilobots to study wide-ranging bio-inspired collective behaviors (e.g. ant house hunting and Turing patterns) and human-swarm interaction. See also AAMAS 2013, DARS 2016, AAMAS 2017, ICRA 2020.
Termes Robots: Another first in the field, the Termes robots (Kali, Isis, and Nargun) used decentralized intelligence to collectively construct 3D structures much larger than themselves (Science 2014 Cover Article). This project made several major contributions to swarm robotics, including (1) demonstrating fully autonomous climbing-and-build robots, using simple mechanical intelligence (2) demonstrating the power of stigmergy (indirect communication by observing and modifying the environment) to create highly complex user-specified structures from decentralized actions. This project was also an early example of collective embodied intelligence (Petersen lab) where morphology and algorithms are co-designed. In addition to exploring other robot designs (e.g. building with soft materials), we conducted field studies in Namibia with biologists to better understand how termite self-organization.
Eciton Robotica: Soft Climbing Robots+ Adaptive Self-Assembly & Army Ant Bridges Army ants (genus Eciton) are well known for their spectacular ability to self-assembly “living structures” out of their own bodies, e.g. bridges and bivouacs that change size to fit colony needs and disassemble after use. Inspired by nature, our lab developed Eciton robotica: the first fully-autonomous and untethered soft climbing robot, capable of climbing in multiple orientations and over its mates, using simple mechanical intelligence. We also demonstrated how adaptive self-assembly (and disassembly!) can emerge from a simple two-state behavior rule. Finally, we studied army ant bridges in Panama and discovered that they exhibit self-organized hysteresis which may provide stability to environment dynamics. (IROS 2017, ICRA 2020, Nature Communications 2022):
Robobees Project: Wood, Nagpal, Wei, Flight of the Robobee, Scientific American 2013. Our lab co-led the NSF Expeditions Project (2009-2014), a multidisciplinary team of computer scientists, engineers, and biologists, funded by a $10 million 5-year NSF grant. Inspired by the biology of bees and the collective power of the hive, the goal of this ambitious project was to push advances in insect-scale robot design and technology and develop novel coordination algorithms that can scale to thousands of simple and unreliable individuals. A key theme was Brain-Body-Colony: emphasizing co-design across the spectrum. In the colony team, we developed several novel macro-programming paradigms for swarm systems (ICRA 2011, IROS 2012). We also worked with the Boston Museum of Science to create public exhibits on the science of bees, robots, and swarms.
ROOT Educational Robot: In 2017, our lab founded an Educational Robotics startup called Root Robotics (video!), acquired by iRobot in 2019. Root is a versatile robot that drives on whiteboards using magnetic wheels, and can sense colors and draw under program control. Our goal was to teach programming across all ages (K-12) in a way that builds on individual interests and creativity (art, sports, music, environment, etc). Thousands of Roots are in homes and schools today. Prior to Root, our lab's Kilobots were commercialized by K-Team Inc (~2011) and are used by researchers and educators worldwide (PBS DeepLook video on Kilobots). We also co-developed patents in soft robotics and soft orthotics. Our lab was a founding member of the Wyss Institute for Biologically Inspired Engineering, and supported many robotics-related tech transfers and startups.
Biological Swarms
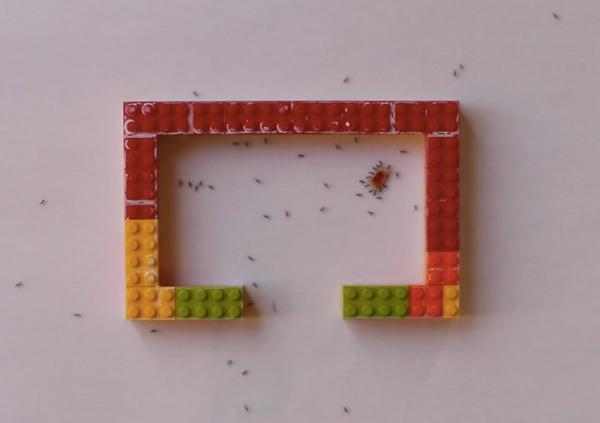
"Physical" Collective Intelligence: cells, ants, termites, fish, beavers! Our lab has made contributions to understanding diverse natural collectives. We are especially interested in how physical interactions lead to complex global collective behavior. For example, in our work on epithelial cells, we discovered how individual cell divisions lead to globally conserved tissue networks (Nature 2004). In our work on collective transport by crazy ants, we demonstrated that groups of ants can collectively problem-solve to escape maze structures (JEB 2016). In our work with army ant bridge self-assembly, we discovered the emergence of hysteresis as a response to dynamic environments (Nature Comms 2022). Most recently we are studying how fluidic interactions between fish lead to different schooling formations (Scientific Reports 2025).
Multi-Agent Systems
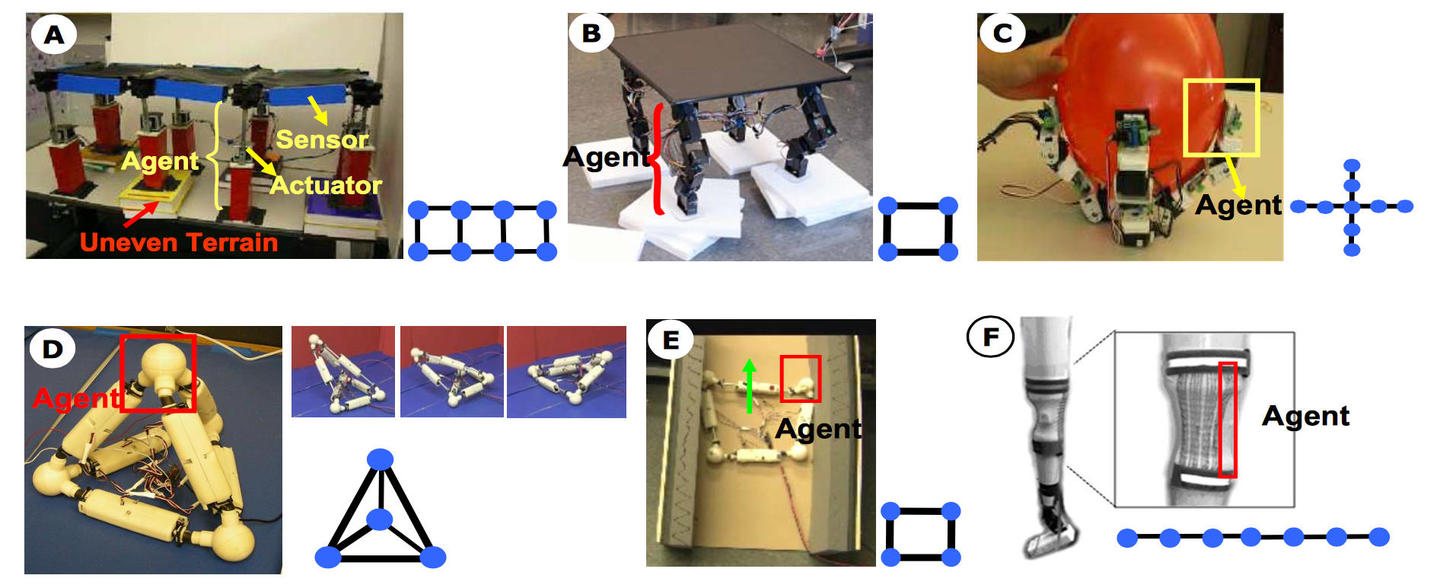
Modular robots and soft orthotics that adapt to the environment Our lab has also developed novel hardware and algorithms for modular robots, which are composed of many distributed sensor-actuator units ("modules) connected together. One main contribution was a new control framework - distributed homeostasis - to cope with environment changes (IJRR 2010). We showed that self-adaptation tasks can be formulated as distributed constraint maintenance on a multi-agent network, allowing us to generalize distributed consensus methods. In addition to new theoretical results, we demonstrated several cool robots! (1) self-stabilizing modular tables and walkways that adapt to terrain (2) a modular gripper that can manipulate fragile objects (3) a linkage-based tetrapod and sheet that can tumble and climb. This work was runner up for the 2010 IFAAMAS Victor Lesser Dissertation Award. We also pursued the development of soft modular orthotics that can self-adapt, targeting cerebral palsy in children. This work was in collaboration with the Wyss Institute, and led to several joint patents on wearable robotics and clinical studies (Bio&Bio 2014).
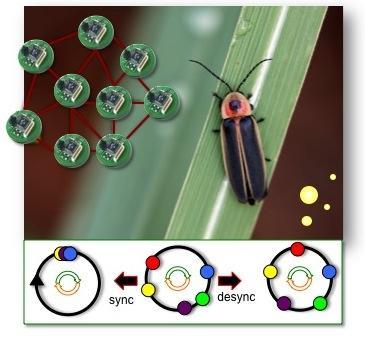
Self-organization in Sensor Networks: Our lab has applied swarm intelligence concepts to a variety of sensor network problems. In the realm of wireless communication, we demonstrated how firefly-inspired synchronization can be used to enable robust synchronization across a whole building, but also can be modifying to enable desynchronization, aka self-organized and self-repairing turn-taking for lossless communication (DESYNC-TDMA). We also demonstrated how local wireless communication can be used to create global localization through the use of "gradients", a powerful self-organization primitive (IPSN 2003, Sensys 2005, IPSN 2007)
Multi-Agent Theory and Self-Organization: Our lab's origins focused on theoretical breakthroughs in self-organization algorithm design. Nagpal's PhD thesis was part of the Amorphous Computing project, where she demonstrated global-to-local compilation, i.e. how user-specified global goals can be translated into decentralized local agent interactions with correctness guarantees (AAMAS 2002). This work was also the first conception of Origami Robotics, foldable modular robots inspired by origami mathematics and developmental biology. Further work in the lab studied local-to-global theory, using cellular automata models to map how limits on individual state and interaction radius leads to limits on the space of global compilers and patterns. (CACM 2000, AAMAS 2002, AAMAS 2008)