
Welcome to the SSR Lab!
In nature, thousands to millions of individuals can cooperate to create complex structure through purely local interactions: fish, bees, ants, even cells! Although each individual is limited, as a collective they achieve tremendous complexity. What would it mean to create artificial collectives inspired by what nature achieves? Our group studies and designs self-organizing systems, where large numbers of relatively simple agents cooperate to produce complex collective behavior. We create novel bio-inspired robots and swarm algorithms, combining embodied intelligence with collective intelligence. We investigate self-organization in nature, in collaboration with biologists. We explore applications to environment, space, architecture, and culture. Our interdisciplinary collective work spans robotics, biology, theory and more.
To learn more about our work, check out Research and Selected Publications and Youtube. To learn about our team and how to join us, see the People and JoinUs pages.
-
 Self-Organizing Swarms and Robots (SSR)
Self-Organizing Swarms and Robots (SSR)













Lab News

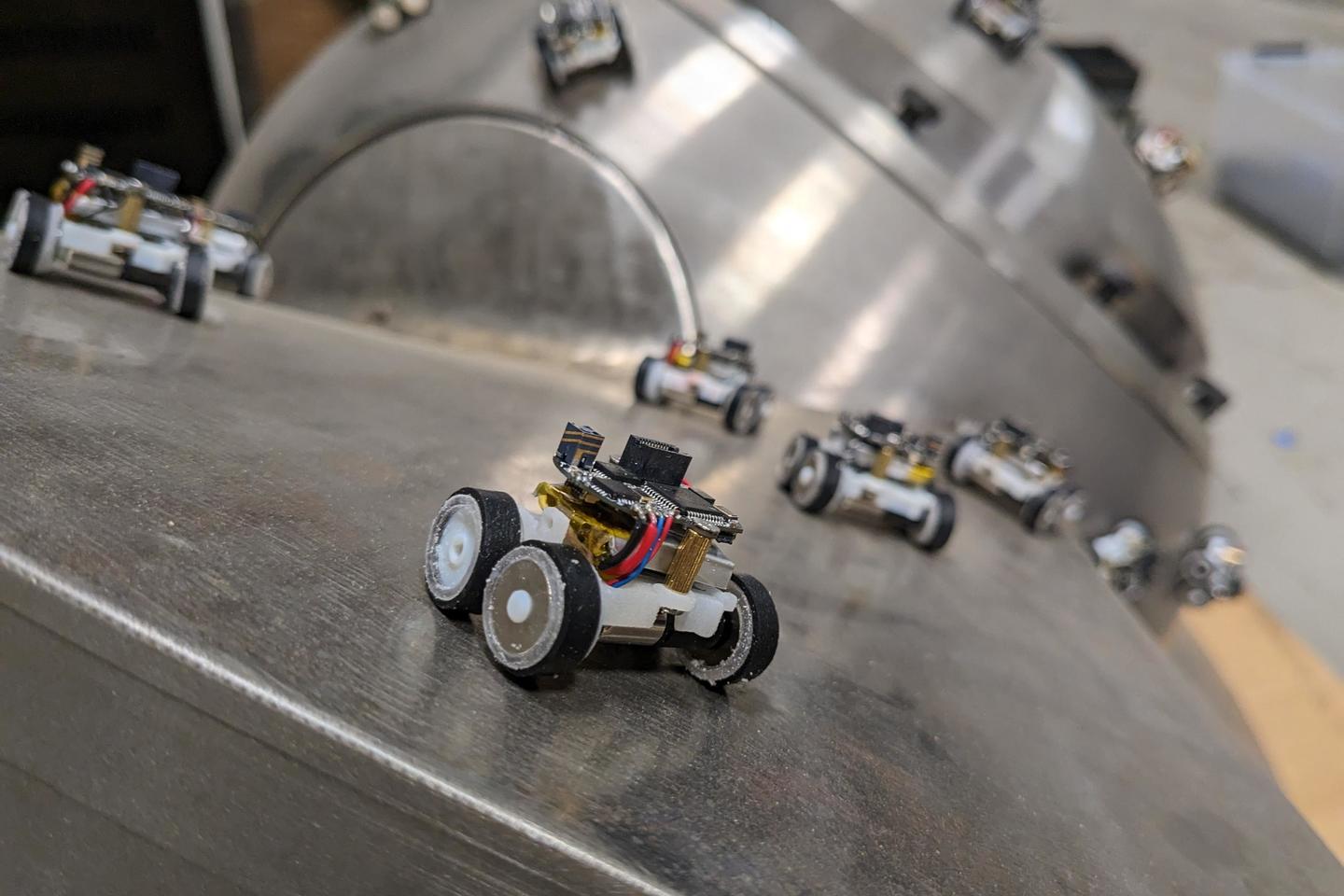
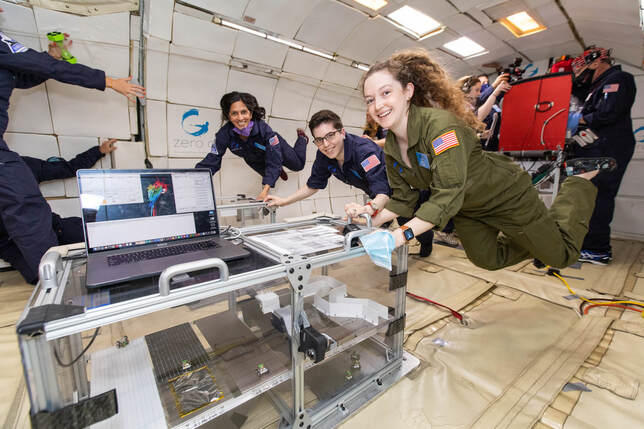
June 2026: Our newest paper at ANTS 2026, led by Sneha Ramshanker! Tumblenauts are minimalist bacteria-inspired robots for inspection in microgravity environments -- they use stochastic run-and-tumble locomotion and collective cooperation to inspect future uncrewed habitats. This unique paradigm enables a simple scalable design…

May 2026: Dr. Merihan Alhafnawi will be joining King's College London as an Assistant Professor this Sept! Her lab will focus on the intersection of swarm robotics and human-robot interaction, building novel social swarms that encourage collaboration, innovation, and creativity. Congrats! We are so excited for this great new…

May 2026: Dr. Di Ni will be joining Lehigh University as an Assistant Professor in ECE this fall! Her lab will focus on developing small-scale robotic swarms, combining mems and collective intelligence, and pushing the envelope on sensing and interacting with the world at fine scales. Congratulations! We are so excited for this…
Jan 2026: The Swarm Garden Project is now published in Science Robotics! Led by Dr. Merihan Alhafnawi, this project brings together swarm robotics and architecture to create living-like adaptive façades for environment, human well-being, and creative expression. Congrats to SSR members Dr. Merihan Alhafnawi, Yenet Tafesse, and…

Dec 2025: We are so delighted that Dr. Hungtang Ko will be joining Tufts University's Department of Mechanical Engineering faculty as an Assistant Professor this January. His lab will focus on "kollective" behavior :-), both in nature and robots, with a special emphasis on collective hydrodynamic interactions.

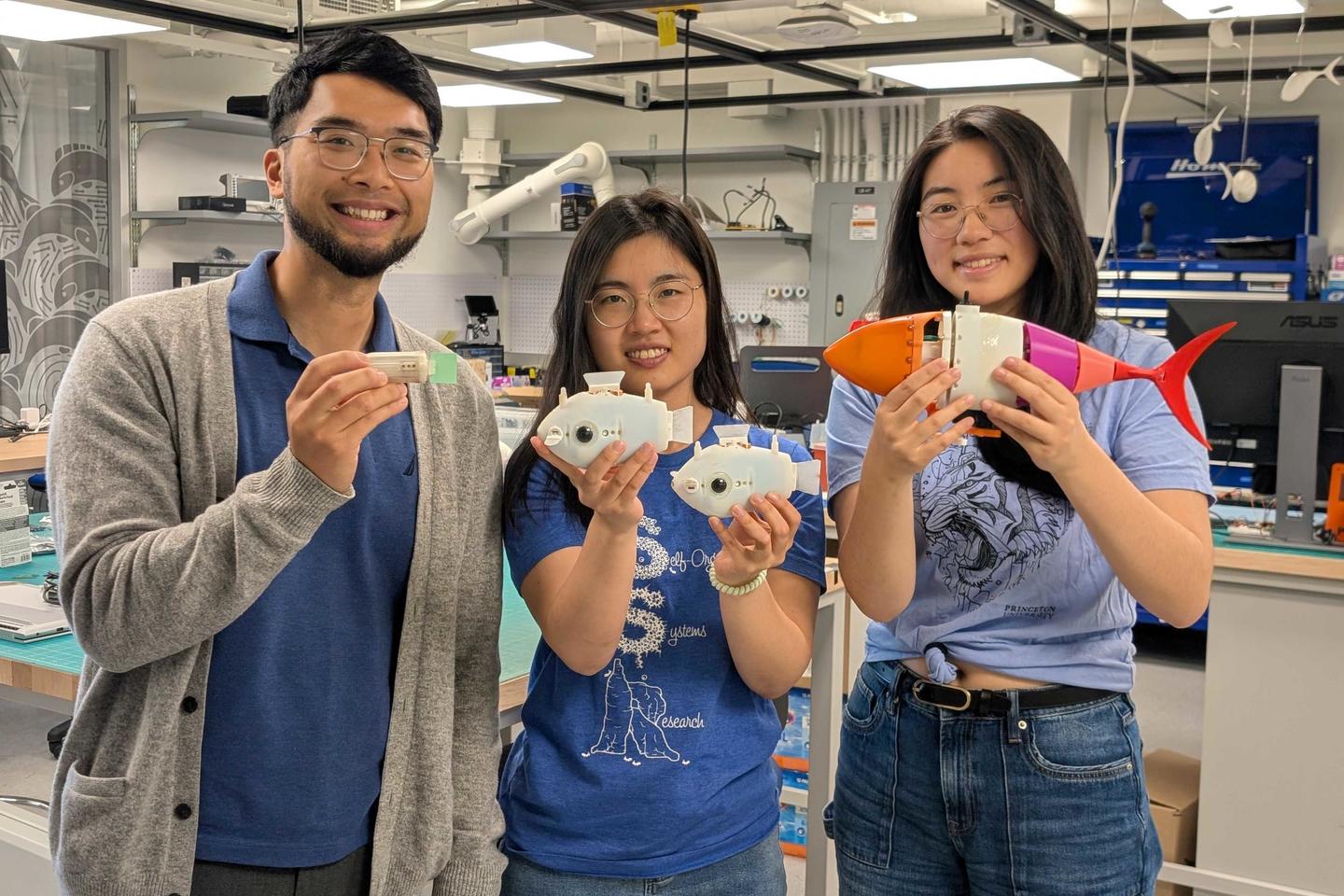
Oct 2025: New paper at IROS 2025! "BlueKoi: Combining a Tuna-inspired Tail with Koi-inspired Body Bending for Maneuverability”. Led by Irene Sha, this paper presents the design, experimental characterization, and low-order model of a new untethered fish-inspired robot for future coral reef exploration. Check out the…
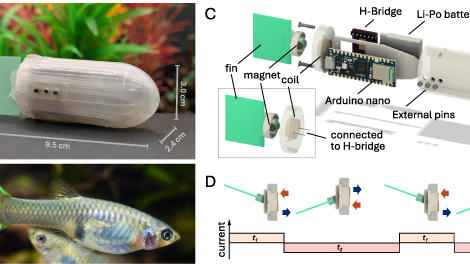
Aug 2025: New paper in Bioinspiration & Biomimetics! How can we design a miniature yet maneuverable robot for exploring complex natural environments, such as mangrove forests and coral reefs? BlueGuppy presents a unique solution that packs a great deal of agility and functionality in a small, fish-like body. Notably, while…
July 2025: New paper in Scientific Reports! Dr. Hungtang Ko and co-authors used long-duration recordings to show that fish schools are highly dynamic, always 3D, and exhibit mini structures like “ladder” formations. Nothing like any of the models previously known. Still so much to learn about the amazing collective…

May 2025: Congrats to Joachim Ambaw, Jad Bendarkawi, Sabrina Nicacio, Brian Mmari, Frida Ruiz, Simon Gotera & Kalu Obasi. Special Congrats to Sabrina Nicacio who is a Knight-Hennessy Scholar and headed to Stanford! It was wonderful seeing current seniors and SSR alum at this year's graduation and…

Oct 2024, DARS 2024: One Keynote, One Award, Two Papers, and a Demo! The SSR group had a terrific time at the Distributed Autonomous Robots conference (DARs) held at Cornell Tech. Congrats to Sneha, Di, and Hungtang for their papers on Self-organized Strategic Sacrifice (Finalist for Best Paper Award)…