
Design and control of a bio-inspired soft wearable robotic device for ankle-foot rehabilitation
Type
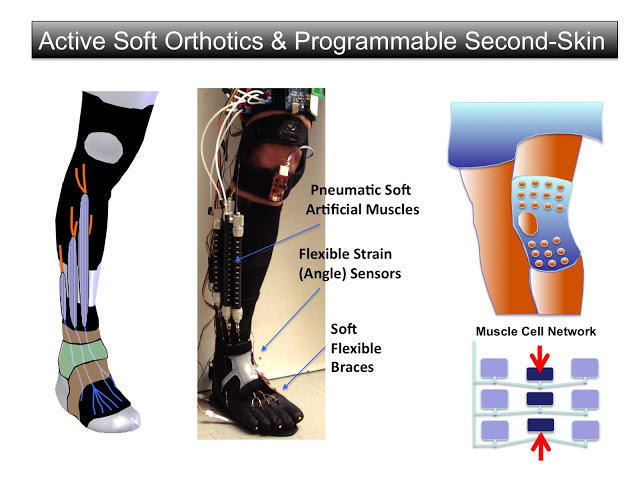
We describe the design and control of a wearable robotic device powered by pneumatic artificial muscle actuators for use in ankle–foot rehabilitation. The design is inspired by the biological musculoskeletal system of the human foot and lower leg, mimicking the morphology and the functionality of the biological muscle–tendon–ligament structure. A key feature of the device is its soft structure that provides active assistance without restricting natural degrees of freedom at the ankle joint. Four pneumatic artificial muscles assist dorsiflexion and plantarflexion as well as inversion and eversion. The prototype is also equipped with various embedded sensors for gait pattern analysis. For the subject tested, the prototype is capable of generating an ankle range of motion of 27° (14° dorsiflexion and 13° plantarflexion). The controllability of the system is experimentally demonstrated using a linear time-invariant (LTI) controller. The controller is found using an identified LTI model of the system, resulting from the interaction of the soft orthotic device with a human leg, and model-based classical control design techniques. The suitability of the proposed control strategy is demonstrated with several angle-reference following experiments.