
A Self-Adaptive Framework for Modular Robots in Dynamic Environment: Theory and Applications
Type
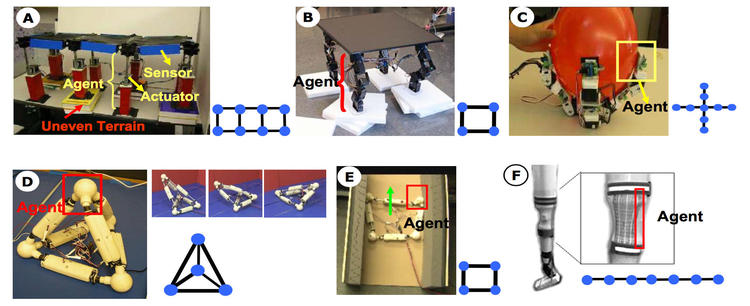
Biological systems achieve amazing adaptive behavior with local agents that perform simple sensing and actions. This has recently inspired the control strategies and design principles of modular robots. In this paper, we introduce a distributed control framework through which modular robots can achieve various self-adaptive tasks. By self-adaptive tasks, we imply tasks where the modular robot uses its distributed sensors to solve tasks and cope with environment changes. We show that modular robot self-adaptive tasks can be formulated as distributed constraint maintenance on a networked multi-agent system such that performing collective self-adaption can be simplified as satisfying local constraints. This formulation allows us to propose a control framework based on a class of multi-agent algorithms called distributed consensus. We further generalize this framework to capture a wide range of sensor–actuator networks in different distributed robotic systems. We prove various theoretical properties of the framework, including its scalability to network diameter and the number of modules. Based on our theoretical understanding, we demonstrate this framework with various tasks, including (1) self-adaptive structures that maintain their shapes in changing environments, (2) an adaptive column that can adapt to external force, and (3) a modular gripper that can manipulate fragile objects. This work provides a deep understanding of the theoretical properties of distributed consensus-type control and its applications to modular robots.
IFAAMAS Victor Lesser Dissertation Award, Second Place (Chih-han Yu PhD Thesis)
