
BlueKoi: Combining a Tuna-Inspired Tail and Koi-Inspired Body Bending for Maneuverability
Type
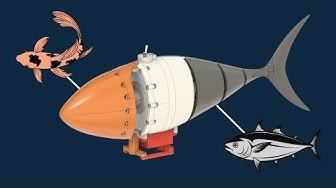
As marine ecosystems face rapid declines, field observations have become essential for better understanding our oceans. Fish-inspired robots are a promising solution, as they are less disruptive than propeller-based approaches in sensitive environments. However, in both fish and fish-inspired robots, there is a trade-off between speed (that favors rigid bodies) and maneuverability (that favors flexible bodies). In this work, we present BlueKoi, an untethered, fish-inspired robotic platform that leverages both a stiff tuna-inspired tail for efficient swimming and a koi-inspired rotating head for maneuvering, reaching speeds of 1.84 body lengths per second and a turn radius of 1.93 body lengths. We experimentally quantify the robot’s turn radius under varying conditions and develop a reduced-order model to both understand the turning behavior and inform future design decisions, without needing explicit measurements of hydrodynamic coefficients. Furthermore, we show that our model is not only accurate but also capable of extending simulations to account for future design modifications. By decoupling propulsion and maneuver- ability, BlueKoi is a scalable and modular platform that enables adaptability for diverse sensing and navigation needs.
BlueKoi Video on SSR Youtube Channel