
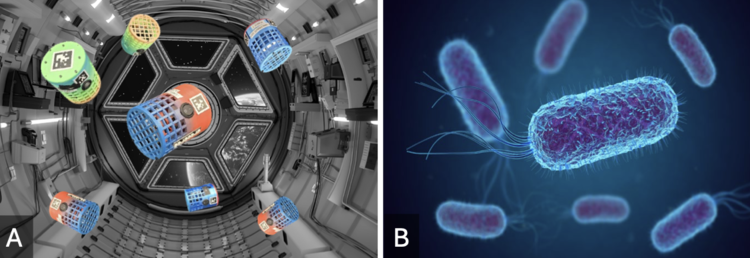
June 2026: Our newest paper at ANTS 2026, led by Sneha Ramshanker! Tumblenauts are minimalist bacteria-inspired robots for inspection in microgravity environments -- they use stochastic run-and-tumble locomotion and collective cooperation to inspect future uncrewed habitats. This unique paradigm enables a simple scalable design, making the Tumblenauts among the smallest and least actuator-dense robots built for microgravity. As a new generation of space habitats is launched into orbit, we envision swarms of Tumblenauts run-and-tumbling within them, providing continuous monitoring and supporting the long-term sustainability of these stations.
Citation: Ramshanker S, Alhafnawi M, Guffer Y, Nagpal R. “Tumblenauts: Towards a Bacteria-Inspired Robot Swarm for Intra-Vehicular Space Inspection”, 15th International Conference on Swarm Intelligence (ANTS 2026).