
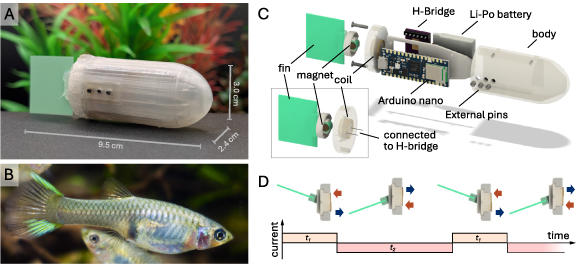
Aug 2025: New paper in Bioinspiration & Biomimetics! How can we design a miniature yet maneuverable robot for exploring complex natural environments, such as mangrove forests and coral reefs? BlueGuppy presents a unique solution that packs a great deal of agility and functionality in a small, fish-like body. Notably, while only having one actuator, it can tune its kinematics -- the speed and the symmetry of its tail movement -- to access a wide range of swimming speeds and turning curvatures. It can swim up to 2.8 body-lengths/s and turn with a 1.4 body-length radius. We demonstrate details of BlueGuppy's hydrodynamics and thrust production in this open-access article in Bioinspiration & Biomimetics. Future work will explore schools of BlueGuppies to study passive fluidic interactions.
This project is led by Dr. Hungtang Ko and is an exciting collaboration between the Nagpal Lab (postdoc Dr. Di Ni and undergraduate Brian Mmari) and the Wissa Lab (phd student Valeria Saro-Cortes) with special support from a Princeton SEAS Innovation Grant.